厦门大学
智能媒体创新实验室
A Robot for Interactive Glove Puppetry Performance
Computer Animation and Social Agents (CASA)
摘要/Abstract
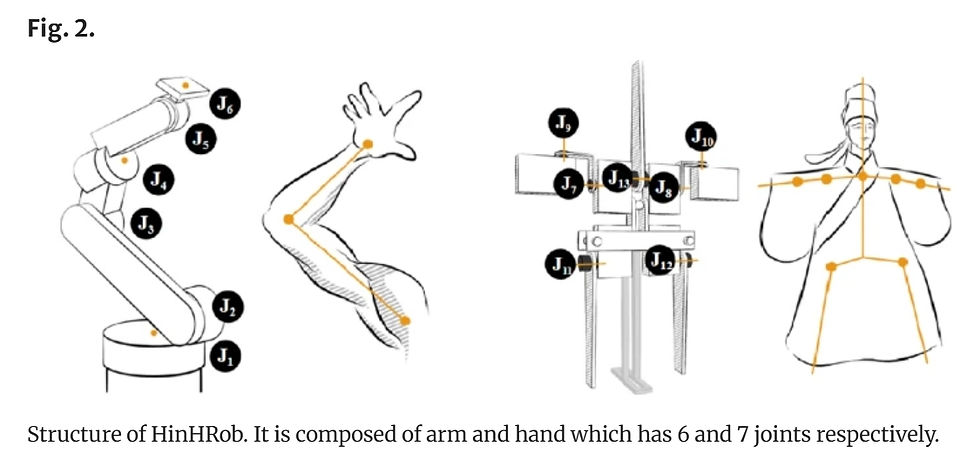
A glove puppet is a puppet operated by an actor’s hand. In China glove puppetry is a type of traditional opera with a thousand-year history. In this paper, a robot named HinHRob is presented to control a glove puppet in interactive puppetry performance. It introduces the structure and the control of motion of the robot in this paper, and presents an example to explain how HinHRob participates in the interactive performance. Questionnaires and interviews are employed to evaluate HinHRob’s performance. The results show that HinHRob can effectively arouse audience’s interest of performances and give audience immersive experience during the glove puppetry performance through different kinds of interaction.
研究框架图/Research Architecture